This website is available at: https://roboorg.ri.cmu.edu/robot-golf-competition-2022/
Slack channel for day-of logistics: #robobuild2022
This year’s competition will be held on Friday, Aug 26, 2022 in the NSH Atrium. The saying goes, “You cannot graduate from the Robotics Institute without actually building a robot!” So here we are, making sure that you build at least one robot during your time at RI!

Robot Golf!
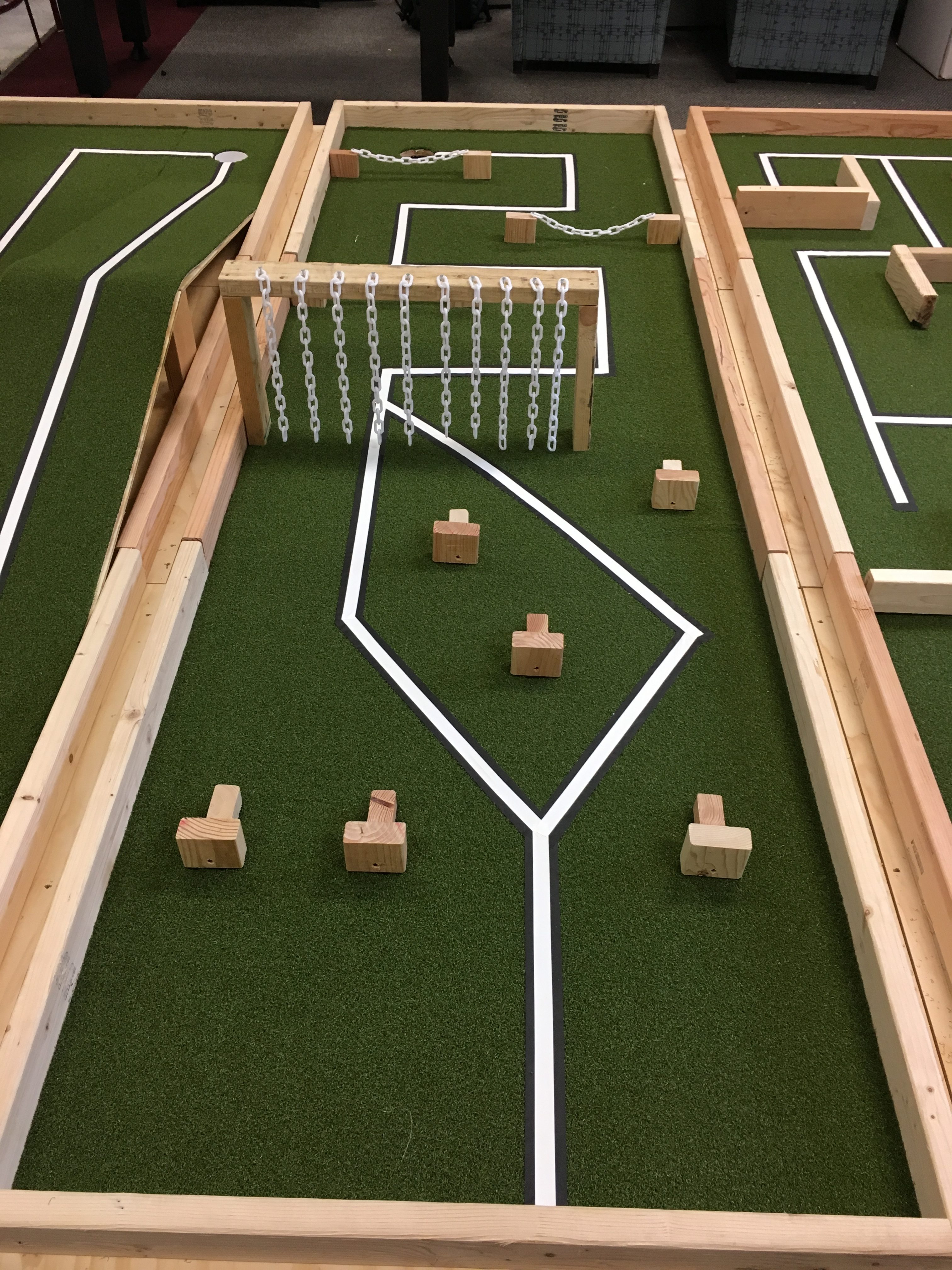
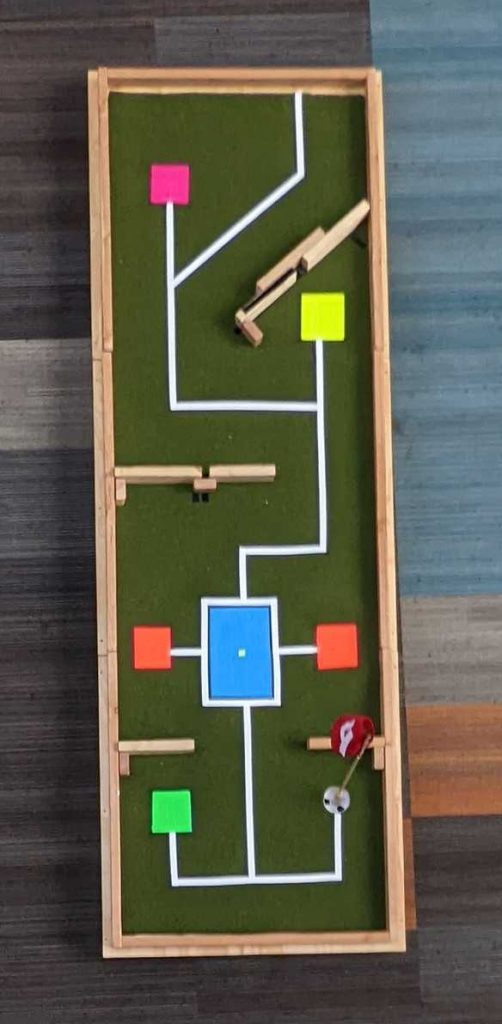
Your objective this year would be to build and program a robot with the VEX robotics kit to play mini-golf in our built courses. The courses will be filled with hazards, so beware. Examples of what the courses will look like:


Robot Kits:

Here is a brief list of the major components…
- Small rubber wheels – 4
- Large Rubber Wheels – 4
- Swedish wheels – 4
- Motors – 7
- Motion Sensors – 2
- Limit switches – 4
- Bumper switches – 4
- Potentiometers – 2
- Ultrasonic sensors – 1
- Motion Controller – 6
- Shaft Encoders – 2
- Claw with motor attached – 1
- Power pack – 1 (Blue)
- Line trackers – 3
- Orange USB Cable – 1
- Wrench – 2
- Allen Keys – 2 or 3
- AAA Batteries – 5 or 6
- Power supply – Given SEPARATELY.
*The picture does not represent the exact kit components, but it gives you an idea of what you might expect.
Team Assignments:
The team assignments and workspace location can be found here: https://roboorg.ri.cmu.edu/robot-golf-competition-2019-teams/
If you have ANY concerns about your team, please email Sarah Conte at sconte1@andrew.cmu.edu, or find her the day-of.
Schedule
8:30AM – 9:00AM: Find your team and pick up a VEX kit from the check-out desk in RoboLounge!
9:00AM – 3:00PM: Build your robot! (Lunch is served in between)
3:30PM – 6:00PM: COMPETE!
6:00PM: Disassemble your robot, and then check-in your kit in RoboLounge!
What do you have to bring?
- No outside materials allowed. If you use anything that is NOT in the kit, you will be forfeited immediately.
- No additional tools allowed. There will be a hacksaw station available from 9AM – 2:30PM. You may only use the hacksaw station if you’ve signed a waiver. These should be sent to your emails before Friday. If you don’t receive them by then, we’ll have extras at the station for you to sign before using the hacksaw.
- Each team must have a Windows computer. If no one on your team has a Windows computer, we may have to do some team swapping…
- Team Spirit!
Competition Rules
- A robot is defined by everything connected to the VEX microcontroller. Each team can only have one robot on the field. Anything that is not a robot is not permitted on the field.
- The robot must be fully constructed of materials from the VEX kit. No outside materials permitted. If your robot has outside material, it’ll be forfeited from the competition.
- The robot MUST be autonomous when completing the course (NO connection to a computer/human), and must be running off the battery pack (NO power supply connection).
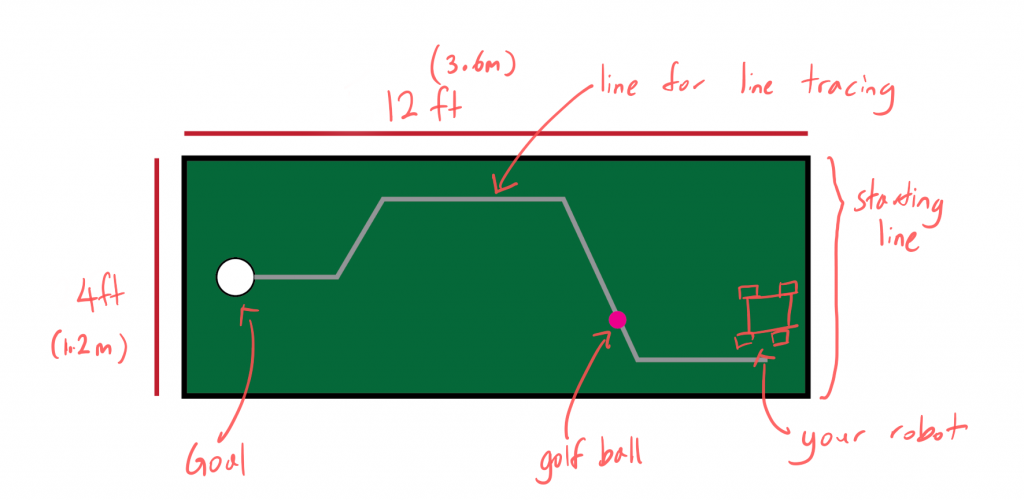
- Robots must start fully behind the 1/3 line of the field (enforced by the gap in the wood for the wall), be touching the wood on the opposite end of the goal, and be under 2 feet tall (measured from the turf).
- Ball starts with/on the robot.
- There are no restrictions on the types of robots you can build as long as it follows the rules. It could be stationary, moving, omni-directional, bi-pedal, etc.
- Each team will have 5 minutes (300s) to complete each course. The course will be restored to the default configuration by the judge before the first attempt and beginning of the timer. The timer will start the moment the on-switch on the VEX microcontroller is turn to the “on” position, and the hand is OFF the robot.
- Multiple attempts are allowed, but the time doesn’t stop if you have to reset. You must reset the field back to the default configuration (e.g. untangle chain, brush rocks off the line) between attempts. The judge must approve the course is back to default configuration before the second and subsequent attempts can start.
- Robots may not touch or interact with anything other than the field elements (turf, wood, rocks, etc.). The ball may not touch or interact with anything outside of the field. You must restart your attempt if any of these restrictions are violated.
- During operation, if any human touches the robot, your time and distance will stop right there, and you will have to reset.
- Each team is only allowed to use one ball. There will be no switching of balls between attempts.
- If the course is not completed in the given 5 minutes (300s), the direct distance from the ball to the goal (ignoring obstacles) will be measured for the fourth tie breaking rule (see below).
Competition Format
Testing
- During the building phase, we will layout some test environments for teams to test their robots. The competition courses will be similar but include additional hazards.
- You will get 1 hour before the competition to test on the real environment.
Competition
- Each team will rotate at each station
- Two judges will be at each station
- We will have a LIVE SCOREBOARD
- You will get SCORECARDS day-of, and you will hand your scorecard to the judge before you start
- After EACH round at the station and the judge filled out your scorecard, you have to bring your scorecard to the SCOREKEEPER, who will update the live scoreboard with your score!
- Winner will be determined once everyone completed all four courses.
The winner will be determined through the following order:
- The team that completed the most courses
- if tied ….
- The team that that completed more difficult courses (order determined by all teams day-of)
- If tied …
- The fastest time from completing all the complete courses
- If tied …
- The team with the least total distance across all incomplete courses at the final time.
Resources
- It is recommended to program the robot using RobotC. Unfortunately, it is only available for Windows. The installer could be found here:ROBOTCforVEXRobotics_455Release.exe
- Samples programs for the VEX kit could be found in “file->open sample programs” in the RobotC program.
- Sensor explanations and sample code: http://www.robotc.net/wikiarchive/VEX2_Sensors_Overview